Frontline Embedded Design
Contest - 2008.
Submitted
Projects.
1.
Ambulatory Blood Pressure Monitor Machine
Name :K.S.Thangavelu, Medical Electronics
(P.G).
Guide : Dr.N.Kumaravel,HOD\ECE.
College :College of Engineering, Anna
University,Chennai.
Introduction:
Ambulatory BP monitoring is a non-invasive, fully automated technique in which BP is recorded over an extended period of time, typically 24 hours. During a typical BP monitoring session, BP is measured every 15-30 minutes over a 24 hour period including both awake hours and asleep hours. The total number of readings usually varies between 50 and 100.This machine consists of three sections, they are BP measurement section, microcontroller section and displaying section.
It uses the oscillometric method ( non invasive method ) to measure blood pressure. This method depend on the transmission of intra-arterial pulsations in occluding arm. The cuff is placed around the upper arm and rapidly inflated to pressure 30 mmHg above the prospective systolic blood pressure, occluding the blood flow in the brachial artery. Then the cuff is deflated gradually while the detecting system by means of a pressure sensor, which detects the oscillometric signal step by step. This is given to microcontroller section.
The microcontroller controls the operation of inflating and deflating the cuff. It stores the oscillometric signals step by step while the cuff is deflating and the process is repeated at regular intervals. This interval can be adjusted by the user. From fundamentals of embedded system we have developed the embedded C program to do the all operations in the microcontroller. The determined blood pressure values are stored in the memory and are displayed using LED.
General Block Diagram :
Blood Pressure Measurement System:
Using oscillometric Method:
Below figure shows the fluctuations observed in an occluding cuff as the pressure is initially raised just above the systolic pressure and then gradually dropped to nearly low at that point the fluctuations are disappears. The second graph shows the cardiac synchronous oscillations present in the cuff pressure which, as indicated above, vary with the cuff pressure. The graph shows the pulse are started at smaller amplitudes when the cuff pressure reduced above or nearly equal to systolic pressure and it stopped just below the diastolic pressure. These fluctuation are used to calculate the blood pressure.
Ps is the pressure above Pm at which As/Am = 0.55
Pd is the pressure below Pm at which Ad/Am = 0.85
BP Measurement circuit diagram :
The BP measurement circuit diagram is convert the pressure variations into the electrical form later it amplified to a specified gain and then it filter to separate the cuff pressure and Oscillometric signal. These two signal are given to Microcontroller section for Digital convertion.
The BP measurement circuit diagram is convert the pressure variations into the electrical form later it amplified to a specified gain and then it filter to separate the cuff pressure and Oscillometric signal. These two signal are given to Microcontroller section for Digital convertion.
Microcontroller And Monitoring System:
The microcontroller controls the operation of inflating and deflating the cuff. It stores the oscillometric signals step by step while the cuff is deflating and the process is repeated at regular intervals of 15,30,60ů., minutes. This interval can be adjusted by the user. From fundamentals of embedded system we have developed the embedded C program to do the all operations in the
microcontroller. The determined blood pressure values are stored in the memory and are displayed using LED.
Complete circuit diagram:
2. An Innovative Smart Card Authentication
Name:
A.Mercy Latha, ECE (III Year),
Guide: Mr. K.Hariharan.
College: Thiagarajar College of Engineering, Madurai.
Abstract:
Nowadays, computational complexity is increasing and several new software are designed to meet the needs. Many of these software are licensed and are of high cost. Hence, these software have to be protected from unauthorized users. In order, to facilitate this, smart cards are provided to the licensed users. Smart card is designed using EEPROM chips. Smart card readers are designed using Renasas microcontroller. The data from the smart card is read by the card reader and sent to the computer through its serial port. Only if there is a match between the stored data and the read data, the user is allowed to login, otherwise, the access is denied. Hence, by using these smart cards the user can login to the system and work on those licensed software. This type of authentication is some what similar to those used in ATM
and the level of security is high.
Block Diagram:
Smart card contains information about the user who possesses it. The details present include similar to those present in an identity card like name, roll number, register number and several other personal details, depending on the application.
The card reader reads the card using I2C interface. I2C is a multi-master serial computer bus invented by Philips, which is used to attach low speed peripherals to a motherboard or embedded system.
The card reader reads the card, through a microcontroller, which is the basic component of it. The controller sends the data read, to the computer, through its serial port. In the computer, a visual C# application is created to be running at the background as long as the system is on. The username read from the card, receives a password from the user, and then it is compared with the pre-existing database, and if a match is found, the user could login and work in the licensed software in the system.
Description:
The smart card is made up of Electrically Erasable Programmable Read Only Memory (EEPROM) 2408. It is 1024Î8 bit CMOS EEPROM with access protection. It has separate data and clock lines, as SDA and SCL respectively. The smart card acts as the slave.
The card reader is designed using Renasas microcontroller R8C which has 64KB+2KB ROM, 3KB RAM and 2KB data flash, with ID code check function and ROM code protect function for program security. The microcontroller supplies clock to the EEPROM and thus acts as a master. The Renasas microcontroller supports I2C, which is shared with synchronous serial communication unit.
The front end is designed in the Visual C# Net platform. It reads the serial port content and compares with pre-existing database, depending on which access is permitted.
Application:
This hardware could well be used in centre where costly and licensed software have to be prevented from public access, where smart cards can be issued to each authorized candidate. Further, the cost of manufacturing of each card is also very economical and will take only about Rs.5 to 10. So, it could to be issued to all authorized users.
Conclusion:
Thus our project provides efficient authentication to avoid unauthorized access of important software of the system. The authorized users use their card to login the system. So that, unauthorized users could not use the computers, hereby, providing an additional security for the computers.
3. GPS Interface With RF Transmitter
Name:
K.Fathima Begam,E.C.E (III YEAR).
Guide : Ms..Sathya.A.
College: Idhaya Engineering College.
Objective:
The objective of this project is to interface Global Positioning System with RF transmitter.
Scope:
The Global Positioning System is a space age navigational system that can pinpoint your vehicle position anywhere on the globe, usually within a few yards or meters. This amazing technology is available to everyone, everywhere, day and night, and best of all, at no cost for use of the navigational data. GPS uses a constellation of 24 satellites in precise orbits approximately 11,000 miles above the earth. The satellites transmit data via high frequency radio waves back to Earth and, by locking onto these signals; a GPS receiver can process this data to triangulate its precise location on the globe.
GPS operates 24 hours a day, in all weather conditions, and can be used worldwide for precise navigation on land, on water and even in the air. Some of its many current applications include: boating, fishing, hunting, scouting on land or from the air, hiking, camping, biking, rafting, pack trips by horseback, hot air ballooning, general aviation, snowmobiling and skiing, search and rescue, emergency vehicle tracking, 4 wheeling, highway driving and a host of other outdoor activities where accurate positioning is required. The acquired information is transmitted to desired place through RF transmitter.
Methodology:
This project is designed by following blocks
- GPS Antenna
- GPS receiver
- RS232
- Microcontroller
- LCD display
- Encoder
- RF transmitter
The GPS system is used to for different application. Here the GPS sensor application is explained with monitor the unmanned automobile. In this project GPS is used to monitor the unmanned automobile position any where in the earth. The GPS sensor is attached in the vehicle whose wants to monitor. The GPS sensor consists of GPS antenna and GPS receiver. GPS uses satellite ranging to triangulate vehicle position. In other words, the GPS unit simply measures the travel time of the signals transmitted from the satellites, then multiplies them by the speed of light to determine exactly how far the unit is from every satellite its sampling. By locking onto the signals from a minimum of three different satellites, a GPS receiver can calculate a 2D (two-dimensional) positional fix, consisting of your vehicle latitude and longitude.
GPS receiver received vehicle latitude and longitude from satellite through GPS antenna. GPS receiver is interfaced with the microcontroller through RS232 converter. RS 232 converter is used to convert RS232 logic to TTL logic vice versa because GPS receiver is the RS232 logic and microcontroller is the TTL logic. Then the receiver sends the received signal to microcontroller. Here the microcontroller is the flash type reprogrammable microcontroller in which we have already programmed. Now the microcontroller displays the latitude and longitude on the LCD display. Then position information signal is given to encoder unit. After the encoding the signal is transmitted through RF transmitter.
Advantage:
Low power consumption.We can easily monitor the vehicle position any where in the earthVery high accuracy.
Applications:
Using the GPS receiver, you can determine your vehicle location with great precision GPS receivers can be hand carried or installed on aircraft, ships, tanks, submarines, cars, and trucks. These receivers detect, decode, and process GPS satellite signals. Many police, fire, and emergency medical service units use GPS receivers to determine the police car, fire truck, or ambulance nearest to an emergency. Automobile manufacturers are also offering moving-map displays guided by GPS receivers as an option on new vehicles, for use in planning a trip.
- This project is mainly used for military application in order to find the terrorist activities in the vehicle.
- In Police department to find the stole vehicle.
- Detective department.
Block Diagram:
4. Wireless Motor Controller
Name: S.karthick, E.E.E (III YEAR).
Guide : Mr.J.S.Christy Manoraj.
College: Government College of Engineering, Bargur.
In our day today life we come across so many problems in maintaining and controlling motors.In this project we are implementing wireless control of motors.
The parameters of motor (ie) current, voltage and speed are monitored.The motor will not be allowed to work beyond the setted values of the parameters.There will be a sender and transmitter at the motor end and also at the controller end.
There are sensors which sense the parameters and send to the sender. The sender will send the data to the controller. The controller receiver will receive the data and input is given to the controller.
The received data are manipulated by the controller and compared with the values already setted. Then the controller will generate control signals if necessary. The receiver at the motor end will receive the signals and work accordingly.
In addition to this there will be a facility for measuring the motor speed. There is a facility for measuring the water level. If the water level rises beyond a certain level the motor will be turned off automatically. If the water level decreases beyond a level motor will be turned on.
5. Automation In Embedded Monitoring System
Name: K. Bharathi, E.C.E. (III Year).
Guide : Mr.A. Athifshah HOD/ECE Department.
College: Kanchi Pallavan Engg College, Kanchipuram,
Usually parents were not aware of their children academic performance, attendance percentage, fees balance.
At present most of parents have busy schedule. They are running short of time. So they could not spend time to visit the institutions in person and collect details about their children.
ot only in school and colleges, this project can be implemented in other public and private sectors like banks, MNC's etc... but we made this tedious process easier by our project.
Parents can make a call so that our automatic design setup will provide the above said information's automatically without any human interference.
The main feature of our project is voice recognition without the help of DSP processors. Here R8C tiny processor plays a vital role. Here we have the telephone line, when there is a call the ring detector indicates it to the processor. The processor will match the name or code number that is given by the subscriber through microphone, the corresponding students detail is given out through the speaker to subscriber.
Microcontroller operates under digital input, the R8C tiny processor supports this task since it as inbuilt analog to digital converter and timer circuit. This can be used for voice recognition. Mainly all the details of the students were stored in the memory of micro controller so the micro controller is effectively used in all means. If more details regarding the people had to be stored, we may use PC to store the details.
6. Bot With Multiple Capabilities
Name : C.Prasad,E.E.E (III YEAR)
College: Government College of Engineering, Bargur
Guide : Mr.J.S.Christy Manoraj,
It is a multi function Artificial device which will process and PROGRESS what ever command we are giving .,it can fly and for an instance.. (Say)
An Area is under fire accident it can be automatically quenched through this robot..
What are all the gadgets do we are using in this is, a blue tooth transmitter and Receptor in both the Operator and Operand side.
Not only message but we can lively see that spots status through this.
And as we prospected it would be light weight in order to hang over to it..
And a camera would be attached to the operand side and a LCD Display would be attached over the operator side to have a Glimpse..
And hence it would easily synchronise with the Ambient.
7. IRIS Based Door Opening And Closing
Name: K.Suriya, E.C.E (III YEAR).
Guide : Mrs.P.Anandhavalli,
College: Idhaya Engineering College.
The biometric person authentication technique based on the pattern of the human iris is well suitable for application to any access control system requiring a high level of security. Today, biometric recognition is a common and reliable way to authenticate the identity of a living person based on physiological or behavioral characteristics. Following steps are involved in our project
- Locating iris in the image,
- Cartesian to polar reference transform,
- Local features extraction, and
- Matching.
The biometric person authentication technique based on the pattern of the human iris is well uited for application to any access control system requiring a high level of security. This paper examines a new iris recognition system that implements
(i) gradient decomposed Hough transform / integro-differential operatorĺs combination for iris localization and (ii) the "analytic image" concept (2D Hilbert transform) to extract pertinent information from iris texture. All these image-processing algorithms have been validated on noised real iris images database. The proposed innovative technique is computationally effective as well as reliable in terms of recognition rates .
In this project camera is used to capture the human iris image and send to PC. In PC the iris is processed using MAT LAB. Already the authenticated irises are stored in the data base. Then the captured iris is compared with data base. If it iris is matched PC send the signal to LPT terminal. Then the LPT output is given to relay driver circuit. The relay deriver circuit is constructed with transistor which acts as switch to turn ON and turn OFF the relay. The relay output is directly given to motor which is attached in the door.
So in this project if IRIS is matched, door will be opened otherwise door will not be opened.
Advantage:
Naturally one human iris is not matched with other human. So this project provides more security then other security system.
Application:
This project is used in the highly secured places such as Bank, secured government places etc.
Block Diagram:

8. Control of Line Following Robot
Name: K.Balaji, E.C.E (III YEAR).
Guide:
College: Sri Ramakrishna Engineering College,Coimbatore.
Abstract:
Line followers have become inevitable in many industrial applications ranging from simple robotic system to advanced pathfinders used in space exploration. The aim of the project is to control a line-following robot using the micro controller. The line-follower uses differential drive mechanism. It senses the black path in a white background and moves along within the defined arena. The movement of the bot is controlled depending upon the need. This system enables us in efficient control of motion of bot in all directions.
The line follower works with a power supply of 12 volts. The body of the bot is made of plastic. The robot is driven by 2 D.C. motors which are controlled by the relay circuitry. There are 2 sensors attached to the front end of the robot. The sensor circuits feed input to the relays which control the direction of movement of motor.
9. Pre Paid Energy Meter
Name:
U.Vijayalakshmi, E.C.E (III YEAR).
Guide : Ms..Josephine Pushpa Arasi.
College:
Idhaya Engineering College.
Todayĺs world is transforming itself into complete digital technology .We have tried to do the same with the existing analog energy meter. We have also tried to introduce a prepaid card scheme with the new meter we have designed.
This project is fully controlled by "MICROCONTROLLER R8C 25 ".
This project is based on prepaid energy meter. It is used for paying the electricity bill in a prepaid method using a smart card. Our program is used to enter the amount in the smart card from the computer through an interface cable. This program is used to store the amount from the computer to EEPROM.The maximum storage capacity in the smart card is 256 bytes. The amount in the smart card is reduced according to the usage of power supply. When the amount is reduced to Rs.5.00, the buzzer sound is produced to inform us to recharge the card. When the balance amount comes to zero the power supply is entirely cutoff.
The residential pre-payment program uses a special electric meter, which is a small display unit, located inside our home and power card, which has a similar operation as that of telephone calling card. The display meter indicates how much energy we are using hourly, daily, weekly .by regular watching at the display unit, we can notice how different appliances utilizes energy. This project aims at the reduction of monthly electric bills by constant monitoring of the display unit. Therefore this power card can be used on a commercial basis.
"Embedded power card is an easy method to save money on electricity".
10. Design Of An Adaptive Embedded Dry-Run Prevention System For Submersible Pumps Used In Farm Lands Using 16 Bit Renesas R8C/25 Microcontroller
Name: M. Saravanan , E.C.E (IV Year)
Guide : Mr. V. Jayaraj.
College: Sri Krishna College of Engineering & Technology. Coimbatore.
Synopsis
In India submersible pumps are used to draw water to irrigate lands. The pumps operating in deficient power lines and dry run without water supply could damage the motor in them.
Conventional Dry run prevention systems take current as reference with tedious adjustment process to prevent dry run. But they are ineffective due to fluctuating power supply in the field.
We have proposed an intelligent fit and forget dry run prevention system using embedded system based on R8C/25 microcontroller. The system is adaptive to any environment and can predict the dry run and switches the motor off. The project is implemented as a product and marketed through Photonic System Coimbatore.
Block diagram of the embedded dry-run prevention system:
Operation:
The voltage input is obtained from stepped down terminal voltage of the motor coupled to the pump. The current input is obtained from the current transformer connected in series with the motor (either R or Y or B terminal). The two signals are rectified and smoothened and fed to 2 channels of the on chip ADC of the microcontroller. The two TAC switches (UP &DOWN) allows the user to set percentage (1-99) which decides the dry run condition. The reference TAC switch button enables the user to set the reference power when the water discharge from the pump is normal.
In the dry run prevention algorithm the power consumed by the motor is sampled for every 2 second and this is compared with the user defined percentage of reference power. If the sampled power is less than the user defined percentage of reference power and this condition is prolonged for one minute then the algorithm switches the motor off by resetting the contactor using a sugar cube relay and then the control branches to the beginning.
This condition is very adaptive for any environment as in many cases the yield of water table replenishes as the pumps intakes water and still in that condition water discharge is needed. Here optional single phase prevention can also be incorporated if the sampled power is larger than the reference power by 15-20%. The system works good universally for all pumps regardless of their capacity and prevents the motors coil from being burnt.
State transition diagram:
11.
Remote Switching
Name:
S.Kandaswamy Manikandan, ECE(III Year),
Guide : Mr.Devapriyan,
College: Thirumalai Engg College,Kanchipuram,
Synopsis
Using Renesas kit with R8C24 IC and with UART communication (RS232) we planned to REMOTE one or more devices with a help of PC (Personal computer). By connecting the kit with the PC required devices can be switched ON and OFF in a required time. Under this method the time requirement can be done. And our project is multi usable it can be used in Industries, Home appliances, Office works, Agricultural and where we needed, to make devices in ON and OFF condition at any time and at any where. And by using Internet we can remote one or more devices at a particular place in this world. To switch ON and OFF the required device, the required switch should be controlled in a place were the switches are placed. And to switch each devices time required a lot. Thus it can be done easily with help of PC by connecting the kit with it. By connecting the kit with PC and by connecting the required devices with the kit the devices can be remote. This can be done through out this world using internet. The user can be where ever in this globe if users need to switch the devices then the user can use this kit with PC and the devices can be remoted easily. If the user is some where and want to switch on or off his/her web cam in their shop they can use this. The devices can be operated easily. And here the PC will be under user control, and the security for the PC used by the user should be under their control. So that other unauthorized person cannot remote the devices with out the knowledge of the user. So that in industry, home, or offices the worth able devices can be used under there own control.
Thus by using our project even rocket launching can be done, and here the timing control will be under the user control. So that the user can operate their devices and the devices can be made under their control even though they are far away from the spot. And this will be more useful in industries, agriculture to make the devices to operate in a proper time in a required time manner. And the time arrangements also can be done to switch on and off the devices. So that the devices can be automatically switched on and off in required time when user sets the timing control in the PC. This will be very useful in gold shops, museums, banks, satellites to operate the web cams, lockers and to have view even the user is not there. If the user in one end knows the password of the system in other end then only the user can operate the system and they can remote the devices. So the unauthorized person can not operate the devices without the permission from authorized person. And the password will change automatically at every time when the system is switched down. And from one terminal of the kit (designed by us) multiple terminals can be done and so many devices can be remoted any where else in this world by connecting the kits with PC with internet.
It can be used in agricultural to switch on or off the motors which is far away from the field and for watering purpose in particular time it can be done, after the process completed the devices will be switched off automatically. And this can also be used in defense or military side to switch on or off the devices to attack the entries of enemies. Hence it will be very useful in all departments to switch the devices under on and off condition in required time and the process can be held in a well performed manner.
Thus we planed our own creativity as per our knowledge to do the best in our ways to renesas team members, Salem gov Engg College and to this world. We had done our level best to prove our ability with our creativity.
12. Prototype Of A Sewage Block Detection And Clearance System
Name:
Maria Cheryl Fernandez, EEE(III Year),
Guide : Dr.Vanaja Ranjan,
College: College of Engineering,Anna University,Chennai.
Contents:
Introduction
Components used
System set-up
Working
Circuit diagram
Introduction:
Despite the applications of engineering in a number of social causes, very little has been done to eliminate the need for manual scavengers in India. The prototype of the model that we have designed aims at trying to automate the system by which blocks in the main sewer line are detected and cleared. Thus we hope to do away with manual scavenging completely and also the stigma that these people are forced to suffer with.
The R8C/Tiny has been used as the heart of the system controlling all operations ranging from block detection to clearance.
Components Used:
R8C/Tiny 16 bit microcontroller
DC motor ľ 60 rpm
Level detector circuits (555)
System Set-Up:
At strategic points along the sewer line, chambers would be built which would be fitted with level detectors. Using simple digital logic, the levels at the 2 ends of the pipes would be compared and for 2 extremes of values, a block would be detected. This in turn would switch on the motor and open the valve allowing water to flow in and flush out the block. Based on the severity of the block the valve is regulated to control the water flow.
Working:
Using 555 circuits for level detectors, the levels of sewage at 2 ends of the pipe are ascertained. There are 3 possible levels: LO , MED and HI.
|
LO |
MED |
HI |
|
LO |
0 |
1 |
2 |
|
MED |
1 |
0 |
1 |
|
HI |
2 |
1 |
0 |
- no risk
- medium risk
- high risk
Based on the magnitude of risk, the speed of the motor is varied. For the prototype, we have used a 60 rpm motor. For practical purposes medium speed with sufficiently high torque motors should be used.
Simultaneously a valve is opened allowing water to flow in to flush out the block. This water. as mentioned, is taken from the sintex tank thus there are no extra requirements. The amount of water flowing in is regulated according to the severity of the block.
0 ľ no flow
1 - medium flow
2 - full flow
Circuit Diagram For Sewage Level Indicator: (Using 555)
13.
Security System Using Renesas Microcontroller
Name:R.Mohanapriya, ECE(IV Year)
Guide : Mrs.K.B.Jayanthi,
College: K.S.R.College of Technology
Security plays the major role in day today life. So it is important to have a security system to inform if any mishap occurs. This can be found by checking the various parameters and if any variation occurs it will be indicated by an alarm or by any application. Microcontroller based application is chosen in this project. The choice of microcontroller is based on number of bits, cost, program flexibility, accuracy, reduction in components etc., Renesas is one such microcontroller which satisfies all the above parameters.
Sensors like magnetic sensors, IR sensors, water sensors and temperature sensors are used in this application. Magnetic sensors and IR sensors are used to identify the door and window status. If any interruption occurs in that area then an error message is sent to the microcontroller and an alarm is produced. This application can also be extended by using a CCTV camera along with the normal Television wherein an image is captured and it is send to the T.V for display.
Water sensors are used to detect the overflow of water. Two levels- lower level and upper level are fixed and if water exceeds the upper level then it will be indicated by an alarm. Temperature sensors are used to sense the temperature by receiving the data from the sensors, processing it with the predetermined values and providing control signals to the alarm display network.
Once the security system is enabled, the green LED glows to indicate the system status. User can now enter proper password to unlock the system. If any sensor goes wrong, an error will be displayed in the LCD with an indication of the type of sensor (T for temperature, I for IR, W for water, and M for door or window magnetic switch). The red LED will also glow to indicate the error. Buzz alarm is enabled and the sound will be produced. As soon as user enters the correct password, the system will be unlocked.
The result of this design has met the expectation, in which every sensor is working and will produce an alarm when the system goes into alert status. The keypad and LCD also offer greater interface. This is a user- friendly system. It can be used not only in the home environment but also in a business environment too. It monitors the surroundings not only to protect the properties but also the life of human beings. Besides, it can be highly customized to suit each one's need and preference. So this security system is very useful to the society.
14.
Robot to replace the mining workers
Name :S.Praveena, MECH (II Year).
Guide :
College: College of Engineering, Anna University,Chennai.
We are working on a prototype robot that would replace the mining workers. It consists of a body which encloses the main circuit of the robot consisting of the given microcontroller that controls the entire robot. One end is provided with the crane like arrangement that digs the mines and carries the dug mine to the target place. It has an odor sensing circuit to sense the mining gas and react accordingly. It is a wheeled robot and we have used the wheel for friction purposes. The robot is constructed out of ordinary wood and mica to make it economical.
15. Automotives Secured Embedded System For Automotives
Name :K. Sasidharan, E.C.E (III Year).
Guide : Mr.A. Athifshah HOD/ECE Department
College: Kanchi Pallavan Engg College, Kanchipuram,
Prelude:
The primary reason people buy vehicles equipped with security systems is to keep their vehicle from being stolen. Our project mainly sticks to safeguard the automotives from theft &
vandalism. The proprietor of the suspective vehicle will be informed with a signal in his keyguard which in advance cuts off the fuel supply.
An Existing System & Its Cons:
The present system restricts the identification of the thief
exists. The objective of the present system mainly consumes high power,
cost seems to be very high for its implementation .In addition with intelli Identification the existing one lags with the usage of
actuation, means for selectively blocking & opening.
Adoption Of The Progect To Rectify Current Problem:
- Sensors are used to carryout the inteli identification.
- Sensors act as an actuators.
- Power consumption is reduced by special feature of renesas.
- Cost of implementation is
diminished by simplicity of components used.
- The integral part of the system cannot be removed or bypassed.
Project Making Out :
The sensors are placed aside the driver seat to efficiently carry out inteli identification
system. This detects the thief& triggers the renesas controller. The controller actuates the alarm at the vehicle & cuts off the fuel
supply. In addition to it the owner is intimated with the beep sound in his keyguard so that the any automotives cannot be stolen at any cost.
Utilisation Of Renesas Feature:
As we discussed earlier ,about the disadvantage of existing
system, power consumption is monitored & reduced by power management features added in the R8C which is used to consume less power than the existing system.
Finale:
Compatible with the other security systems making our project the perfect foundation that makes fool of thieves.
16.
Industry Monitoring Robot
Name : N.William Ringal Taube, ECE (III Year),
Guide: Mr. K.Hariharan,
College: Thiagarajar College of Engineering. Madurai
Introduction:
In this modern world, the growth of science and technology is incredibly high. In particular, the development in the field of robotics is monstrous. Here we have designed a robot which is capable of monitoring a whole industry. The main feature of our robot is its walking ability. This robot is capable of walking with its four legs. The circuit diagrams and block diagrams are shown below.
Block Diagram:

Circuit Details:
The circuit details are given below. Initially when the motor rotates, the potentiometer (pot) attached to the motor also rotates. The pot is provided with the supply voltage. So the variation in the voltage of the pot is given to the ADC of microcontroller. Here with the help of our program we are able to control the motors. The above mentioned circuit details take care of the position of each and every motor.
The driver circuit for the control is given below. Here we had used a worm geared motors. They have some excellent characteristics that it can be rotated only by means of providing supply and not by simply rotating the shaft. But it has a drawback of high speed. To control the speed of this motor, we had used the following circuit. In this circuit we had used an astable multivibrator to control the input voltage given to the motor by which we had controlled the speed of the motor. Instead of using a pot to control the speed, the reason for going to astable mode is that the current decreases in case of using the pot which is not present in case of using astable mode. We had used a double contact relay for each motor. The relayĺs coil is connected in series with a transistor to the supply. The base of the transistor is connected to a buffer (74HC126N). The Enable for each input of buffer is connected to
microcontroller. The buffer is used because the current from the microcontroller is not sufficient to energies the coil of relay. The motor is connected to the common terminals of relay and supply is given through Normally Open (NO) terminals of relay. The circuit diagram is shown below.
Fig 2. Relay Control of motor.
Application :
Now coming to the application of the robot, it controls the various operations in an industry. The position at which a particular operation has to be carried out is known by the robot by means of using a colour sensor. Here we had used this concept to choose the position. On reaching the particular position, it will do the work as per the program we had done for it. (We are now working on this particular area)
17.
Intelligent safety control system
Name : G.Varun, ECE (II year),
Guide: Mr. L. Karl Marx.
College: Thiagarajar college of Engineering, MaduraCore principle :
A control system that has input parameters from sensors and acts on a safety algorithm when inputs are beyond their stored limits.
A sample application :
Problem statement:
Road accidents occurring in the event of sudden failure of driver's consciousness due to heart attack
or any such physical problems, or due to improper function of one or more components of the vehicle are common. Adequate, cost effective and a complete safety system is not available currently.
Project aim and innovation:
A complete safety system in vehicles accomplished by a single controller that monitors both the vehicle and the driver. Innovation of the project mainly is the implementation of a heart rate monitor to watch over the motorist's consciousness and a safety algorithm that will be applicable to most emergency road accident prone situations.
Project description:
An application embedded in automobiles that monitors both motorist and the automobile. A sensor strapped to the wrist of the driver, transmits the heart rate of the driver to the controller. The controller converts these pulses into digital data which is then compared to preset values. If the input value is abnormal, the controller queries the motorist whether he or she is in consciousness. If no positive response is obtained within a given time limit, emergency mode is activated in which a safety algorithm is followed. First the horns and both indicators are activated to alert nearby vehicles. The horns and indicators are kept on till reset is applied. Then, after a time gap, a motor is run to apply brakes to the vehicle slowly so that it gradually comes to a stop. This is done in such a way so that vehicles following immediately donĺt crash into. The controller then transmits an emergency signal in radio frequency. This signal which contains the number of the vehicle and its position calculated by GPS or a GSM mechanism can be received by emergency care centers, nearby hospitals or traffic authorities. The controller also monitors the working conditions of various vehicle components such as fuel-air ratio, under-inflation of
tyres, coolant temperature, throttle position, carburetor, brake oil etc. If any deviation from normal working conditions is noted, the driver is immediately alerted. Thus by timely action, a complete safety monitor is achieved at a meagre cost/ The controller also stores the data of heart rate so that it may be submitted as a regular report to a doctor for monitoring the driver's heart as heart rate is a very good parameter for any signs of heart illness.
Other possible areas of usage:
Such a system can also be used at homes to monitor senior citixens when they are left alone. If any emergency arises, a message is transmitted to emergency numbers. It can also be used as a control system in hospitals to reduce manpower, in power-plants or other industries where continuous monitoring is required. It can be used as a data-logger to continuously store data from the sensors in a cost effective manner. It can be used in hotels to continuously monitor the cooking and inform the corresponding chefs.
Working model description :
Pots are used as representation of sensors and are connected to the controller's ADC. The controller uses scan cycles to monitor each sensor. If the pot variation goes beyond the limits of the preset input values, the controller queries the user through a LCD and a buzzer to alert the user. If the user doesn't press the button to imply that he is okay within a given time limit, the emergency mode activates in which two LEDs act as representation of control switches of the horn and the indicators. A stepper motor is connected that is representation of running the brake. A keyboard is interfaced to enable a user interactive menu which is designed in such a way that the user can program the controller to set the limits of any sensor he wishes to choose. He can also set the vehicle number and contact details to be transmitted in emergency. The transmitter of a RF module (Rx and Tx 433) is connected to the controller that transmits the emergency message. The receiver is connected to a separate controller and an UART so it can be received on screen through a hyper terminal.
Basic flow diagram for the vehicle safety control system

18. Embedded Control System
Name :
U. Vasantha Priya, ECE(III Year).
Guide : Mr.A. Athifshah HOD/ECE Department.
College : Kanchi Pallavan Engg College, Kanchipuram,
Project Report
Now-a-days cell phones become a part of day to day life. The use of mobile phones becomes unavoidable. Though its use is restricted while driving vehicles, many people not even consider these rules. This leads to accidents causing loss of many lives.
No solution was found till now to overcome this burning problem. So we have designed our project such that the speed of the vehicle is automatically slowed down to a particular level while attending the calls.
An antenna is used to trace out the call frequency and is given to a radio receiver suitable to receive both CDMA and GSM (from 800 MHz to 1900 MHz). The received signal (if necessary can be amplified) is given to9 the R8C tiny microcontroller. The displacement sensor then determines the gear position and informs it to the microcontroller so that the controller can reduce the speed of the vehicle to the minimum speed of that particular gear level.
Then the speed will be reduced and is also indicated in the LCD placed in the dash board so as to inform the driver about the reduction in speed. Then the microcontroller will be in idle state and the speed will be controlled till the end of the call.
Once the call is dropped the microcontroller goes to wait state and now it is ready to receive the next signal. Now the speed can be increased to its original speed.
Since the microcontroller will be kept in wait state or idle state for most of the time the power consumption will be low. Thus power management in R8C tiny microcontroller is used in our system design.
We assure that there is no risk of accidents because the vehicleĺs speed is only reduced and it is not stopped all of the sudden.
19. AN EMBEDDED SYSTEM FOR REAL TIME BUS
STOP MONITORING.
Name : G.Shankar, ECE (IV Year),
Guide: Mr. K.Hariharan,
College: Thiagarajar College of Engineering. Madurai
Abstract:
Real time information sharing is an inevitable phenomenon in the fast moving world. Information sharing about the transportation has also become essential. The project focuses on developing a wireless system that will share the information about Bus location in a specific network zone. Information is sent to the transceivers present inside the Bus wirelessly. Wireless sensing and communicating system including transceivers located on the bus and the Bus stop are developed. The proposed system provides the appropriate status of the Bus and its current location available to the transceiver module affixed at the Bus stop. It provides information about the next bus stop to the passengers in the Bus and at the bus stop. All the nodes in the terminals and the vehicles are connected in a wireless network. The network is developed effectively to notify the status of each node in a network.
Block Diagrams:

PROJECT DESCRIPTION:
The overall block diagram of the system is shown in Figure 1.The designed embedded system is capable of delivering the information about the next expected bus at a particular terminal to the people waiting there and the information about the nearest bus stop to the passengers inside the bus and these informations are displayed in the display unit. The block diagrams of the modules inside the Bus and at terminals are shown in Fig 2 and Fig 3. The wireless transceiver module used in this project is CC2500, which is low cost 2.4 Ghz RF Transceiver. It has numerous facilities, which makes the system reliable and cost effective. It is interfaced with the microcontroller through SPI interface. Each node has a unique ID stored which is used to distinguish between buses. The nodes at the terminals are tied together in a well defined configurable network through serial interface and are capable of delivering information about the bus that has arrived to a particular terminal to the rest of the network as required. When a bus arrive near a particular terminal the information regarding the bus are transmitted through the RF module. Once the information is transmitted the nodes at the terminal receives it and sends it to the next terminal via the backbone network. At the same time the terminal node send the information about the next terminal to the bus via wireless network.
The designed embedded system has a lot of scope and applications in day-to-day life, which makes transportation easier and information rich. Further the system is cost effective and can be easily implemented. The future work of the designed system relies on the development of the Multilingual information display and Data capturing through Global positioning System(GPS).
The overall block diagram of the system is shown in Figure 1.The designed embedded system is capable of delivering the information about the next expected bus at a particular terminal to the people waiting there and the information about the nearest bus stop to the passengers inside the bus and these informations are displayed in the display unit. The block diagrams of the modules inside the Bus and at terminals are shown in Fig 2 and Fig 3. The wireless transceiver module used in this project is CC2500, which is low cost 2.4 Ghz RF Transceiver. It has numerous facilities, which makes the system reliable and cost effective. It is interfaced with the microcontroller through SPI interface. Each node has a unique ID stored which is used to distinguish between buses. The nodes at the terminals are tied together in a well defined configurable network through serial interface and are capable of delivering information about the bus that has arrived to a particular terminal to the rest of the network as required. When a bus arrive near a particular terminal the information regarding the bus are transmitted through the RF module. Once the information is transmitted the nodes at the terminal receives it and sends it to the next terminal via the backbone network. At the same time the terminal node send the information about the next terminal to the bus via wireless network.
The designed embedded system has a lot of scope and applications in day-to-day life, which makes transportation easier and information rich. Further the system is cost effective and can be easily implemented. The future work of the designed system relies on the development of the Multilingual information display and Data capturing through Global positioning
System(GPS).
PHOTOGRAPH OF THE PROJECT:
20. Hidden Markov Model Based Real Time
Automatic Speech Recognition System
Name :
R.Ganesh, B .Tech. Telecommunication Engineering. (IV Year),
Guide: Mr. R. Prakash.
College :VIT University, Vellore.
Project Description:
1. Introduction
1.1 Necessity of Automatic Speech Recognition (ASR) systems:
Speech Recognition is a multi-billion-dollar industry. Though many aspects are clearly understood, it is clear that there is much we still donĺt know. There is no human-quality speech recognition system. Performance degrades rapidly when small changes are made to the speech. It has a major role in many applications.
Some of the applications are automated customer services, Hands-free operation, Applications for physically challenged and Dictation, Translations in computers.
1.2 Challenges in ASR:
Natural speech is continuous. It changes with rates of speech, pronunciations and across speakers. Large vocabularies are often confusable in case of speech recognition. End-point detection of a word present in the speech itself is a challenge. Recorded speech is variable over room acoustics, channel characteristics, microphone characteristics and background noise. Co- articulation is often a problem. This is the difference that humans can often compensate for, but that current recognition systems often cannot.
1.3 Speech Features:
Some of the common features used in speech recognition are Mel‐ Frequency Cepstral Coefficient
(MFCC), Linear Predictive Cepstral Coefficient (LPCC), etc. These features provide information about the vocal tract of a speaker. Feature extraction transforms the raw signal into feature vectors. In this project, MFCC is used as a feature of speech.
Speech signal is convolution of vocal tract impulse response V(n) with input Excitation E(n).

Cepstrum is spectrum of decibel spectrum. It is used to deconvolve speech signal to extract the required features. The human ear resolves frequencies non-linearly across the audio-spectrum. Mel‐ frequency scale is a non-linear scale that models the non-linear human listening behavior. This is why overlapping Mel-frequency bands (V1 (w), V2 (w)ůůVn
(w))as shown are used.
2. Simulation
2.1 Feature Extraction:
The speech signal is divided into frames containing equal number of samples. The spectrum of each frame is obtained by computing N-point FFT of each frame individually. The energy of the Mel frequency bands corresponding to each frame is calculated. This gives the desired "Mel Frequency Cepstral Coefficients" or "Spectral log-energy features".
After obtaining the features, they are quantized with definite number of representative vectors. Each feature vector is compared with all the representative vectors and is replaced with the minimum distance representative there after.
2.2 HMM based Classification:
Thus when all the frames of a specific word are processed in the same way, a pattern of representatives for the same is obtained. After many trials, Hidden Markov Models for each of the words are trained with the obtained pattern and stored in the database.
The probabilities of the pattern generated by the test word to have occurred from the HMMs in the database are found out. The word corresponding to the HMM with highest probability is the actual pronounced word. If all the probabilities are lower than a specified threshold, then it is concluded that the test word does not belong to our database.
3. Feasibility of the ASR system in Renesas R8Ctiny:
The speech (isolated word signal) samples are stored in the internal memory. This is done manually for perfection now. This can be done in real time using a microphone by buffering the data from A/D converter. After dividing them into frames with equal number of samples, the spectrum of each frame is obtained. The N-point FFT results are stored in a separate memory segment. The energy of the Mel frequency bands corresponding to each frame is calculated (multiplying each melü]band to all the spectral frames and squaring). Thus the desired features are obtained. These vectors are quantized with a set of representatives which form the code book.
In case of simulation, the words were classified using ĹHidden Markov Modelĺ. But it is a difficult task to code HMM in the microcontroller since it is fully based on probabilities and state transitions. Therefore, some simple classification methods have to be used here.
4.
Conclusion:
If the system is made application specific, the database used will be comparatively small and the system will be able to classify even words with similar pronunciation using the generated patterns. The simulated system was tested with four English words and four Tamil words separately uttered by many speakers and then with English and Tamil words together. The performance of the system can be improved by using multiple classifications such as HMMs for finding the language to which the test word belongs to and then finding the word.
If the system is made application specific, the database used will be comparatively small and the system will be able to classify even words with similar pronunciation using the generated patterns. The simulated system was tested with four English words and four Tamil words separately uttered by many speakers and then with English and Tamil words together. The performance of the system can be improved by using multiple classifications such as HMMs for finding the language to which the test word belongs to and then finding the word.
21. Industrial Safety Monitoring System
Name :V.Kaliyarasan, ECE(III Year).
Guide : Mr.Vijayaragavan.
College: Thirumalai Engineering College. Kancheepuram
Synopsis
Any embedded system, in general, incorporates hardware, an operating system,a low-level software binding the OS to the peripheral devices, and a communication software that enables the device to perform predefined functions.
In contrast to a desktop PC that performs a variety of tasks, a micro-controller performs a single, well-defined task. An embedded system has a microprocessor, associated peripherals, and software intended for a specific purpose. The hardware used is generally custom-built for the systemĺs specific purpose and may vary according to the applcation that one is working on.
Our Project deals with the application of this embedded system in the Real-time safety monitoring aspect of an industry. Parameters such as Voltage, Temperature are measured and processed by the R8C/25 micro-controller and the measured data is transmitted via RS232 for prolonged monitoring and analysis. Moreover, a Gas sensor has also been interfaced to widen the scope of this particular project thus making it more effective.
The micro-controller and PC are connected through a standard RS232 interface. The embedded system is designed specifically to take note and end the tasks carried out within no time if an adverse situation occurs that may be hazardous to the environment. LEDs are connected in the circuit to indicate High Voltage and High Temperature. A buzzer sirens if any gas-leak is detected.
Software/Tools Implemented
Hardware Implemented
- R8C/25 Microcontroller
- Temperature sensor
- Voltage sensor
- Gas sensor
- Buzzer
- LED
Basic Block Diagram
22. Speckle Noise Smoothing Algorithm
In An Embedded Environment
Name: T.Anusuria, E.C.E (III Year).
Guide : Dr.B. Ebenezer HOD/ECE Department.
College: Sri Krishna College of Engineering & Technology. Coimbatore.
Abstract:
Our project describes the algorithm which we have developed to remove speckle noise which is a random, deterministic, interference pattern in an image formed with coherent radiation of a medium containing many sub-resolution scatters. In our algorithm we make use of sigma filter which has been shown to be a good solution both in terms of filtering accuracy and computational complexity. In this algorithm the center pixel value is replaced by the mean of the neighbor pixels. In our method, the ratio of the standard deviation to the signal value, the "coefficient of variation" is constant at every point in an image corrupted by a pure multiplicative noise. This property is exploited in identifying the pixels whether they are corrupted by noise or not.
Introduction:
The SAR systems use the RADAR imaging techniques to capture images on the earthĺs surface. The merits of using a RADAR technique rather than a microwave is that the RADAR is a day/night data acquisition system which provides subsurface information. It remains unaffected by any atmospheric interferences. This makes RADAR an "All weather Remote Sensing System". Infrared rays are sent from the SAR systems which are coherent in nature. When these rays go out of phase due to backscatter from inhomogeneous objects grains are formed in the image which is considered as a noise. This type of noise is called as speckle noise and it is a multiplicative noise. The speckle noise deteriorates the image quality and it degrades the fine details and edge preservations of the image.
Objective:
Our objective is to provide a tool which removes the speckle noise in an embedded environment. This is realized by using HEW ( High Performance Embedded Workshop Environment ) which is a powerful development environment for embedded applications targeted at Renesas micro-controllers.
Methodology:
Block Diagram :
Formula:
The range of limits for reducing the effect of speckle noise in a pixel are calculated using the formula.
Lower limit = cp- (2*image variance*cp) Upper limit= cp+ (2*image variance*cp) where cp is the center pixel value in a 3 x 3 matrix.
Flowchart:
Result:
We have implemented our algorithm in MATLAB and our results are promising. We have converted the MATLAB code into C code which can be compiled by R8C 24/25 Tiny Microcontroller.
It is found that blurring has been considerably reduced and using this algorithm better sharp images can be obtained with fine details and edge preservation.
Noise Affected Image:
Denoised Image
 
Comparison:
Many filtering techniques including median filter, lee filter and frost filter are among better denoising algorithms in radar imaging. However these filters are efficient in case of removal of less density of speckle noise. Since our algorithm uses fixed point arithmetic, this is computationally very efficient even in the case of high density of speckle noise.
Many filtering techniques including median filter, lee filter and frost filter are among better denoising algorithms in radar imaging. However these filters are efficient in case of removal of less density of speckle noise. Since our algorithm uses fixed point arithmetic, this is computationally very efficient even in the case of high density of speckle noise.
Application:
Our algorithm can be implemented in the microcontroller and it can be used in defense system where we are not able to get a clear picture of our target. The corrupted image from the camera will be processed through our microcontroller and interfacing an LCD we can get a clear view of image. It can also be used in mobiles where we can capture the image process it and the resulting image can be viewed again in the same display after computation process.
Conclusion:
A simple algorithm for the removable of speckle noise has been used. Since the noise is of multiplicative in nature, the sigma filter is helpful in removing high density speckle noise. There are several algorithms developed to improve the quality of the images overcoming the speckle noise. Among which ours would contribute a drop to the ocean.
23. A LOW COST AND ENERGY EFFICIENT ELECTRONIC MAGNIFYING SYSTEM
Name : Rohit .R. Bishani, B.Tech ECE (III Year)
College:VIT University, Vellore.
Abstract:
The goal of this project is to develop a low cost magnifying system which can be used by semi-blind people to help them in reading or observing things. Semi blind people cannot read normal font which needs to be magnified by 500% .The system is designed to be low-weight, which can be connected to a TV to view the enlarged text. Though such kinds of product are available in US market but their cost is around 400$. Since 80% of semi-blind people in India are below poverty line, they cannot afford such products hence we make it low-cost which will be very well within their reach. TV is used as a output unit since its more common and cheaper than a PC and laptop. The system consists of R8C/tiny
microcontroller, a video DAC and a CMOS sensor array is used as camera. Camera captures the image and sends the digital data to R8C/tiny MCU which converts it to PAL B TV standard format using video DAC as a peripheral device . The major advantage of using the R8C/tiny MCU is processing speed is very fast thatĺs why we were able to generate the Video output. Programming is done using software tools like SANGO and HEW. We are in process to further extend this project by making it wireless which will enhance its utility extremely.
1.Introduction
A. Hardware:
CMOS array sensor: It is a module purchased consisting of a sensor array and s parallel cable through which controlling signals and data is transferred.
It is a module purchased consisting of a sensor array and s parallel cable through which controlling signals and data is transferred.
It is a module purchased consisting of a sensor array and s parallel cable through which controlling signals and data is transferred.R8C/tiny
MCU: This is the MCU from RENESAS Technologies which is used to receive signals from the camera. The received signal is sampled, processed and converted into PAL B format (since it is the stanard used in INDIA).
This is the MCU from RENESAS Technologies which is used to receive signals from the camera. The received signal is sampled, processed and converted into PAL B format (since it is the stanard used in INDIA).
This is the MCU from RENESAS Technologies which is used to receive signals from the camera. The received signal is sampled, processed and converted into PAL B format (since it is the stanard used in INDIA).Video Digital-to-Analog Converter : TV is a component which receives analog signals sampled at specified rate. Therefore, the digital signals from the MCU is converted into analog signal with the synchronising and blanking pulses introduced by the MCU.
TV is a component which receives analog signals sampled at specified rate. Therefore, the digital signals from the MCU is converted into analog signal with the synchronising and blanking pulses introduced by the
MCU.
TV is a component which receives analog signals sampled at specified rate. Therefore, the digital signals from the MCU is converted into analog signal with the synchronising and blanking pulses introduced by the
MCU. Interfacing of the microcontroller with the television :
MCU is interfaced with the TV. Microcontroller sends the received image in the format according to PAL-B standards with the following details :
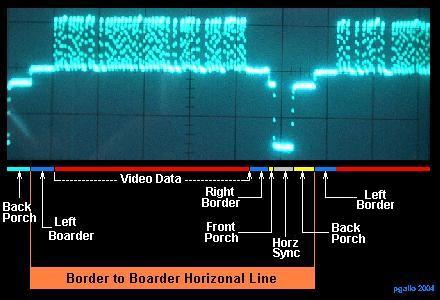
Out of total line period of 64us the line blanking period is 12 us. During this interval a line synchronizing pulse is inserted. The pulse corresponding to the differentiated leading edges of the sync pulse are actually used to synchronize the horizontal scanning oscillator.
The line blanking period is divided in to three sections. These are the Ĺfront porchĺ, the Ĺ line syncĺ pulse and the Ĺback porchĺ. The time intervals allowed to each part are summarized below and their location and effect on the raster is
Period time
Total line(H) 64
Horz blanking 12+- .3
Horz sync pulse 4.7+-.2
Front porch 1.5+-.3
Back porch 5.8+-.3
Visible line time 52
Front porch :- This is a brief cushioning period of 1.5 us inserted between the end of the picture details for that line and the leading edge of the sync pulse. This interval allows the receiver video circuit to settle down from whatever picture voltage level exists at the end of the picture line to the blanking level before the sync pulse occurs
Line sync pulse . After the front porch of blanking, horizontal retraces is produced when the sync pulse starts. The fly back is definitely blanked out because the sync level is blacker than black. Line sync pulse are separated at the receiver and utilized to keep the receiver line time base in precise synchronism with the distant transmitter.
Back porch . This period of 5.8 us at the blanking level allows plenty of time for the line fly back to be completed. It also permits time for the horizontal time-base circuit to reverse direction of current for the initiation of the scanning of the next line .
Vertical Synchronization:
A Signal according to the above timing diagram will perform Line Blanking, Synchronization for the Vertical Scan.
MCU will takes the input from the receiver in digital form and then magnify it using the following code :-
Now this magnified code is in digital form which is sent to the PORT1 of the MCU to which the DAC is connected. Using DAC LN0808 the following voltage levels are set
Results And Discussion :
The magnifying system which we implemented is very cheap and useful for semi-blind people especially in developing country like India where around 80% of the semi-blind people live below poverty line.
24.
Wireless Access In Car
Name : K.Kirubhakaran, ECE(III Year),
Guide: Mr.Chirsty Manoraj
College: Government College of Engineering, Bargur
SYNOPSIS
In this modern world, everyone needs the flexibility or user compatible with any product in order to save the time. And also everyone needs to enjoy the facilities provided by the modern technology.
Here, we did a project to reduce the manual work to access the car by using a remote control. At the same time, the security system prevents the car-theft. The various features of our project were explained here with the help of the block diagram.
Block Diagram :
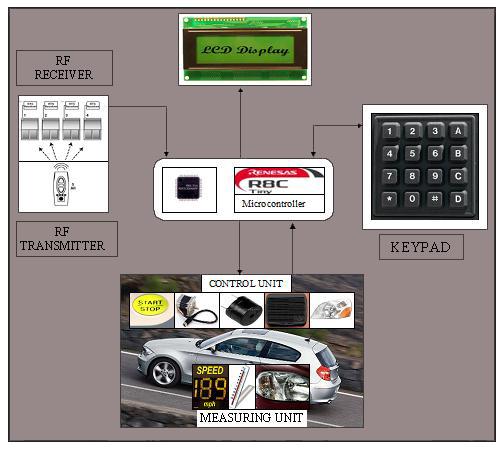
Block Diagram Units:
- Microcontroller Section.
- Display Section.
- Keypad Section.
- RF Transmitter & Receiver Section.
- Control Unit.
- Measuring Unit.
Microcontroller Section:
Here, the features such as controlling, displaying, protecting the car was performed. Since it is the fastest microcontroller, it performs the jobs at very high speed.
Display Section:
In Display section, we are using 4x20 LCD display to display the features like Speed, Temperature and various Menus of our project.
Rf Transmitter & Receiver Section:
Transmitter:
A Four Channel RF Transmitter (433KHz) which is used to transmit the four different signals corresponding to the features available.
Receiver:
A RF Receiver which is used to receive the signals from the transmitter and send it to the microcontroller.
Control Unit:
It drives the units like
- Start/Stop the Car.
- Open/Close the Driver Seat Door.
- Activate/Deactivate the Security System.
- On/Off the AC in the Car.
- Auto Headlight.
Measuring Unit:
It measures the physical quantities like
Project Explanation:
By using the remote control, we can perform the operations which are mentioned in the Control Unit. If suppose the remote may lost or it may not work properly, in that critical situation the security system has been deactivated by using a switch provided on the door.
The keypad plays the vital role in our project. All features can be accessed by the keypad too. Even the remote can be deactivated by the keypad. To protect the whole system, entry restriction is provided by using password.
25.
Intelligent Fuel Level
Indicator
Name:
A.A. Nippun Kumar. B.E. E.C.E (III Year).
Guide : Prof. B. Gopi.
College: Sona College of Technology. Salem.
Abstract:
Due to the vast development in the digital technologies, now a days all the analog parameters are being converted into digital values to achieve the good accuracy. The simplest way to covert those analog values into digital values are by using ADCĺs. But instead of reading analog values and then convert it into digital, in many applications, they are receiving the digital informationĺs directly by replacing ADCĺs, even though reading digital informationĺs are difficult but they produce better accuracy.
There are different methods by which the former can be achieved. Here is the project named as "I-FUEL INDICATOR", which indicates the fuel level in the tank of four wheeler in digital format along with speed and forecasting
As the name indicates, it gives the level of fuel in tank and other parameters, which seems to be similar to that of the basic water level indicator setup. But there is a major difference between water and fuel (i.e.,) water is a pure conductor, where as fuel is a perfect non-conductor. So the concept behind the level measuring for water and fuel becomes totally different.
Here is the setup which can be suitable for both water and fuel, which utilizes the optical principle of LEDĺs. For indicating each & every level of fuel, one LED is used and it varies depends upon the calibration level respectively.
Here the heart of the set up is light emitting and sensing units. Both these units are placed inside the fuel tank, from which the level of fuel is going to be measured. Here the setup is designed for indicating the fuel from reserve level to five liters. Therefore totally six LEDĺs are used, correspondingly at the opposite six LDRĺs are used for each LED respectively.
The float is introduced to travel in between these two units. When initially tank is empty, the light from LED falls on the LDR, therefore its resistance gets minimized. If tank starts filling, when it reaches one litre, then the float blocks the light transmission path between that corresponding transmitter (LED) and receiver (LDR), so this makes the resistance of LDR to reach the maximum value. Then same procedure is used to determine the remaining levels.
Then the next stage is converting the resistance to corresponding voltage level (i.e.,) for high resistance it produces low voltage and vice versa. Since six optical setupĺs are used, it is necessary to use six corresponding resistance to voltage converters. Then the output from the RVC (resistance to voltage converters) corresponds to the level of fuel in tank.
Then that voltage value is converted into logic level voltages (0V &+5V). Since at the input side, we are using a negative co-efficient device (LDR) for sensing the light, it is necessary to use NOT gate for getting logic level voltages (0V&+5V).
Then from the NOT gate corresponding outputs are feed to the PORT1 of the controller. Similarly PORT0 of the controller reads the speed level, since this is a prototype module, we are using push button switches for speed indication from the range-0 to 100 Km/h. So based on the logical voltages at PORT0 and PORT1 for every instance, PORT2 produces the corresponding outputs which contain FUEL LEVEL, SPEED & FORECASTING which is to be displayed by using a 16x4 LCD display.
Conclusion:
The major purpose this project is to add intelligence to the vehicle and reduce the manual work in this fast moving world. It is believed that this technology brings an excellent solution to some of the abnormal indications of fuel level in case of hills and mountains and we are working for it. Also it is a user friendly device which can guide the user to make an effective utilization of vehicle at each instance depends on the fuel level and speed respectively.
26.
E-Cultivation
Name:
R.Aravind Kumar, ECE (IV Year).
Guide:Prof.B.Gobi,
College:Sona College Of Technology,
Abstract:
Agriculture is the backbone of our country. Recent developments in technologies are in no way nearer to its potential when one sees its advancement in the field of agriculture. Our concept of the project is to bring up systems that will automate the irrigation process in cultivating plants. Our system will automatically water the plants according to its required quantity. Thus a farmer can simply monitor a complete cycle of cultivation without worrying about irrigating the plants at right time.
The system uses a microcontroller which continuously monitors the moisture level of the soil in the given area. Hence enormous amount of water is saved enabling the surplus water to be stored for future use. Also the farmers need to spend little time on one agricultural field. Power consumption is also reduced as the motor is run only when it is needed to be. The system is a low cost one and one-time investment and hence greatly suits our agricultural sector.
Flow Chart:
27.
Fabric-Q-Testing
Name:
R.Yuvaraj, ECE(III Year),
Guide: Prof.B.Gobi,
College: Sona College Of Technology,
Abstract:
Selection Of The Project:
Nowadays productions of cloths are in higher rate due to day to day increasing population. During the production, obviously errors are occurred due to looming makes the loss of quality and quantity. Even regarding to bundle of cloth it may increase to a greater extent. In order to identify this, we go for a special technique which helps to show the error of the cloths in all areas in cloths, automatically using LED, LDR sensors.
First, we have to find the reason for an error occurring in cloths. Every looms are manufacturing the cloths with certain reed and pick, it gives the distance at which the warp yarn and weft yarn weaving respect to each other. If it keeps constant, there will not be error or vice versa. It simply represents the thickness of the cloth.
Introduction:
Our project title is "FABRIC-Q-TESTING". The main concept of our project is to identify the damaged cloths, which is mingled with good cloths at particular areas such as textile fabric industries, garments and weaving factories etc.
In those areas, there is a control section and some people are working together to find the errors behind the cloths. Therefore, by using our project, the errors can be predicted without manpower and we can save valuable time in a cost effective manner.
Synopsis:
In order to determine the probability of the error, we have designed and developed a new system called "FABRIC-Q-TESTING" using renesas
microcontroller. The optical sensors are placed on the top and bottom between the cloths. This system comprises of nine LEDs and single LDR said as sensors. Two stepper motors are used to move the sensor unit and to row wise increment of cloths. When cloth is feed into the module, the sensor starts scanning as inch by inch in a row and send the corresponding values to microcontroller after analog values are digitally converted. After the completion of first row, it will get back to the second row and scanning process takes place. If once the error is persisted, the process will be terminated and the microcontroller transmits the train of pulses over LCD module. It displays the row/column at which error is notified. Even the different countingĺs of the cloths can be used to find the error by setting the input as process before started.
Block Diagram:
Block Diagram Description :
Led sensor:
The LED sensors are used to detect the errors, when it passes between the cloths. The LED transmitter always transmits the signal to the LDR receiver. When the sensor unit crosses the cloth, it sends the signal to differential amplifier.
Differential amplifier:
The differential amplifier here acts as resistance to voltage converter which translates incoming resistive value from LDR in terms of voltage and passes it over microcontroller.
Microcontroller:
When the sensor crosses the cloth, the voltage value is received from differential amplifier is compared with the reference voltage which is already loaded in the controller. Regarding to the values we are obtained from the sensor, the quality might be varied. Then it passes the digital signal to LCD module.
LCD Display:
If the reference voltage is less compared to sensor voltage, it displays as error occurred otherwise it display as good cloth. It also displays the row and columns scanning.
28.
Efficient Braking Detector System
Name:
P.C. Karthika, E.C.E (III Year).
Guide : Mr.A. Athifshah HOD/ECE Department
College: Kanchi Pallavan Engg college, Kanchipuram.
Project Report:
One of the major causes for the accidents is the brake failure in the vehicles. These brake failures may be due to various reasons. One of the reason is the non ľ efficient braking
ie. due to the ageing effect in the brake shoe and brake drum, which can be detected by the " Efficient Braking Detector System" Project.
Nowadays, the vehiclesĺ brake system is not regularly checked before taking it on a drive but are serviced twice or thrice in a year as a servicing procedure. This may certainly induce non ľ efficient braking.
The wearing out of the brake drum and brake shoes are carried out of every single use of the brake system as leads to ageing process. So that the gap between the brake drums and brake shoes increases. This may result in non ľ efficient braking or even brakeless situation leading to accidents.
To avoid accidents which happens due to non ľ efficient braking can be overcome by the "Efficient Braking Detector System" Project. It will be helpful for the adjustment of gap between the brake drum and brake shoe which can be done by Automatic slack adjuster.
The following are the features of the project:
- Usage of R8C/ Microcontroller.
- Usage of flexible communication interfaces ie. CAN protocol.
- Usage of sensor for regular monitoring of slack rod.
- Digital display for the display of brake efficiency in numerical of individual wheels (both Front & Rear).
Control Area Network [CAN]:
- Compatible with CAN 2.0A & 2.0B specifications.
- FULL CAN [Extended CAN Compliant].
- Support 11 or 29 bits message IDs.
- Operates up to 1 Mbps.
- Sixteen 16 ľ byte message buffers.
- 3 hardware acceptance filters.
- Re-Transmission abort functions.
- Loop back & Time-stamp functions.
- Listen Only mode.
The efficiency of the brake is calculated by an important factor "Slack rod". The length of the slack rod can be measured with the help of a sensor. The length of the slack rod outside the wheels suggests the gap between the brake drum and brake shoe inside. The slack rod is adjusted by an Automatic slack adjuster for the correction of gap between the brake drum and brake shoe, précised to be 0.5mm for efficient braking in the vehicles. If the gap in more than 0.5mm then delay in brakes takes place resulting in non-efficient braking. If the gap is less than 0.5mm then skidding of tyres takes place, when brakes are applied.
The wear out may not be similar for all the wheels in the vehicle. It depends on the usage of the brakes. The efficient braking is calculated for every individual wheels in the vehicle. The efficiency of brakes in individual wheels is displayed in the digital display setup.
By analyzing the brake efficiency using "Efficient Braking Detector System" project, non-efficient braking can be avoided in vehicles which ensures safer mode of drive resulting to safer journeys.
29.
Electronics Pape Polling Machine
Name:
Prasath .K, ECE (III Year)
Guide : Mr.A. Athifshah HOD/ECE Department
College: Kanchi Pallavan Engg college, Kanchipuram.
Report:
Malpractices are happening in the election date which is the major headache in the democratic India due to this problem, Many castro topes are caused even to the common man .Some of the malpracticess that is happening in the democratic countries are, without having eligibility some persons may vote. In current existing system, the booth controller will misuse the polling system,the duplicate voting card may be produced.
The controlling set up will be done usually, so time requirement is high. If voters press more than one button it will be considered as false polling and it will not be identified by voters and also cannot giving another chance for polling the vote, the voters can identified by photo identification and name in vote list so their privacy will be affected.
In our project booth controller cannot control the polling machine . Individual citizens are having their rights to vote . Electromagnetic stripe card reader and the polling setup is fully based on the R8C Controller so, the duplicate polling card cannot be framed .Since the manual controller is replaced by the R8C Controller the time consumption will be less in which R8C Micro Controller compares the input data with the existing data. If the data given by the voter are acceptable, then the controller initiates the polling setup. If the voters press more than one button, it will be considered as false polling but the person will be identified,the personis having chance to poll the vote again.Repeated voting can be avoided electromagnetic stripes card with specific psaaword will be given to individual voters with this the voters privacy will be raised. Photo identification,mole identification with signature will be available in the voters card. By this particular voters can able to poll their vote electromagnetic stripes card contains signature,details, finger prints. Apart from this if the government symbol is added,original card cannot be replaced by the duplicate cards.
Every individual will be provided with the electromagnetic stripe card . Each card will have a separate password. In this setup,voting machine can accept the vote only with Electromagnetic Card and its specific password.
Compare with existing polling system, the R8C microcontroller based polling system can be used to rectify the false polling.
ATM Card, Driving Licence, Ration Card and Identification card instead of these cards we can use only this voters card. With the help of transmitter and receiver section the voters can be directly counted by election commission.
30.
R8C Based System Design
Name:
V. Aarthi Devi, M.E. (Applied Electronics)
College: CEG Guindy (Anna University)
Abstract
Today microcontrollers are currently used in a wide range of fields, and with the advent of the "ubiquitous" age, that range continues to expand. Microcontrollers are required to have higher performance together with increased ease of use in a variety of application areas.
The enhanced on chip resources make the microcontrollers a promising candidate for complex applications .In this project a microcontroller based PWM implementations scheme is proposed that can produce high resolution PWM patterns and sine wave is generated from PWM.
An R8C microcontroller computes PWM pulse width on the basis of Sine wave samples. Sine wave pattern is sampled at regular intervals with particular sampling rate and PWM signal can be generated using Timers of microcontrollers. From the PWM, sine wave is generated using filter.
In the second phase of the project three PWM wave are generated and three phase sine wave is generated from the Pulses. This can be used on control of working of Inverters.
|